2.1 KiB
2.1 KiB
Team 65266 Lego Dynamics - PYNAMICS - Pybricks Utilities
A collection of Pybricks utilities to assist in your FLL robot programming with Python. Created by FLL team 65266, Lego Dynamics.
How to use this:
- Download the repository by clicking on the "Code" tab, clicking the "< > Code" button, then downloading as a ZIP. Additionally, you can also use
git clone https://codes.fll-65266.org/Arcmyx/pybricks-utils.git. Unzip the archive and open code.pybricks.com. Then choose which folder you'd like to use, and open each file in pybricks by using the import button. For example, to use the diagnostics tool, simply open each program in thediagnosticsfolder into Pybricks. Then, follow the instructions for each utility.
Included utilities:
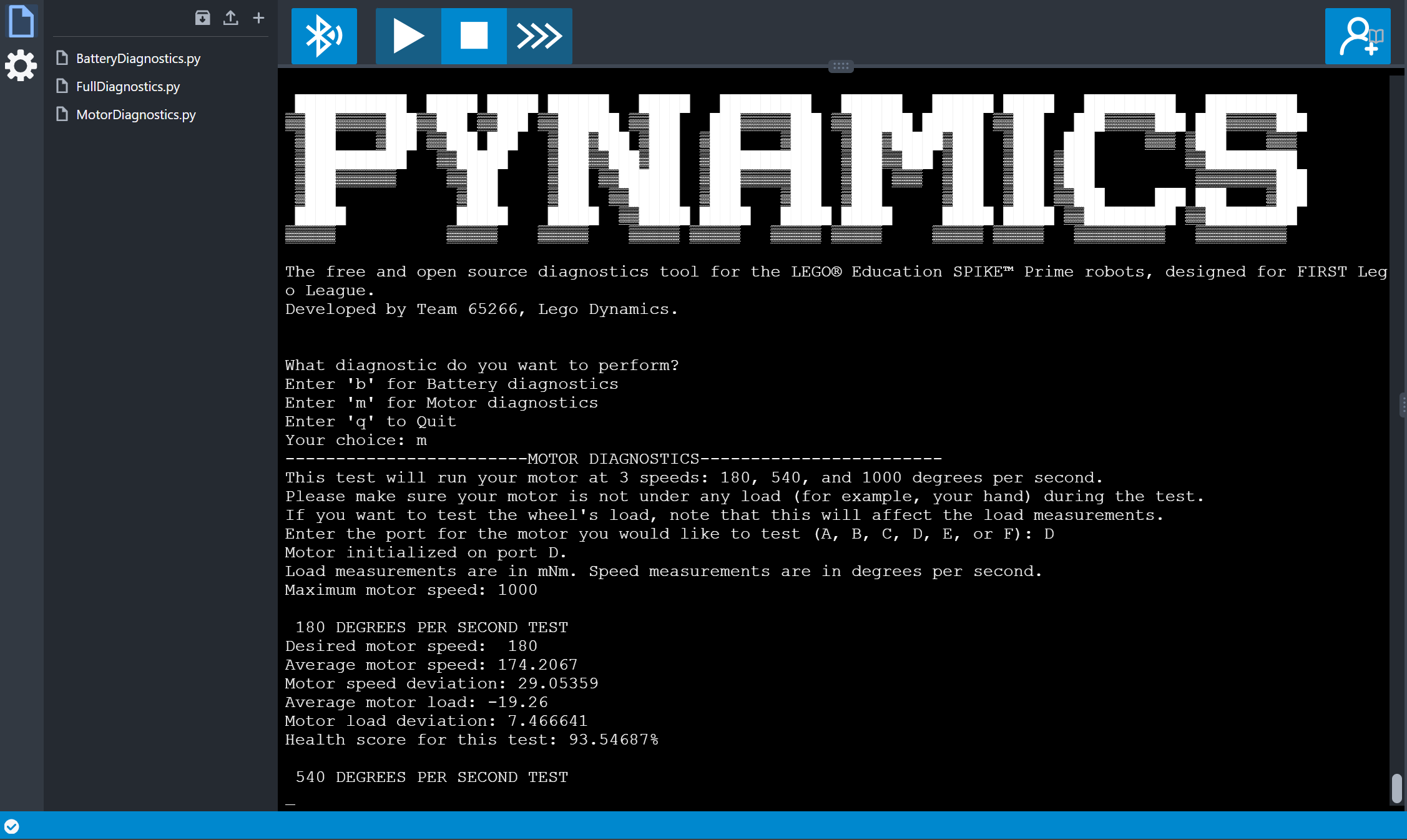
- Diagnostics - a program that allows you to diagnose issues and test parts of your robot, such as battery, motor, and color sensor. Open each program in the
diagnosticsfolder in Pybricks, connect your robot, switch to theFullDiagnostics.pyfile and press run. - Color Sensor Tests (UPCOMING) - a program that identifies what color the sensor is detecting. If you'd like, you can use our color ranges in your own programs.
This code is licensed under the Creative Commons Attribution 4.0 International License (CC BY 4.0).
Without the confusing legal speak, this means that you are free to:
- Share — copy and redistribute the material in any medium or format.
- Adapt — remix, transform, and build upon the material for any purpose, even commercially.
Under the following condition:
- Attribution (BY) — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. Essentially, give us credit, link this repository, and don't take the credit for our work, because that's just sad.
For the full legal details, please review the CC BY 4.0 Legal Code (read the LICENSE file here).